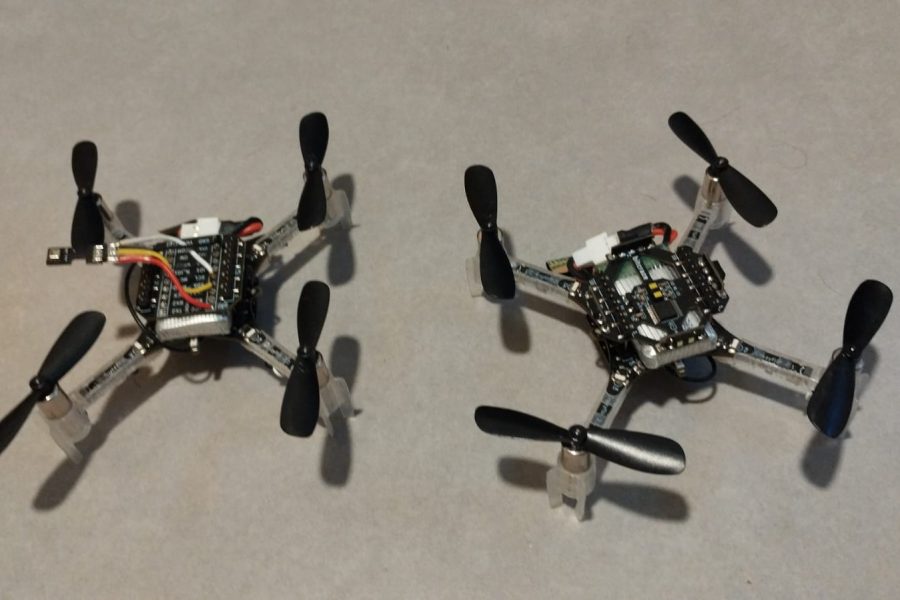
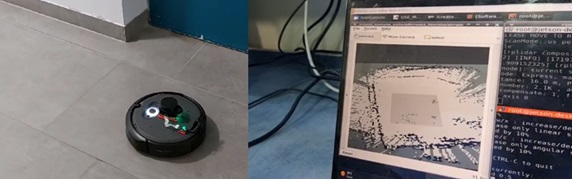
The increasing prevalence of drones has prompted a critical need for effective counter-drone systems. While ground-based methods have limitations, this research explores the potential of drone-based acoustic detection. By leveraging aerial platforms, we aim to overcome challenges associated with ground-based systems and develop a more robust and adaptable counter-drone solution. This paper presents a novel approach combining advanced signal processing, data augmentation, and deep learning to accurately detect drones through...
Categories:
Robotics and systems