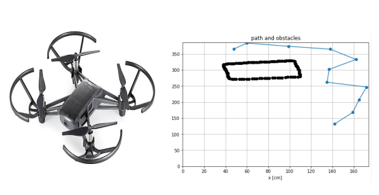
In the project a comprehensive real-time 3D hoop detection and localization system was developed using a ZED M stereo camera and a YOLOv8 model. Initially, a baseline YOLOv8 network was trained on approximately 1,000 images annotated via Roboflow -incorporating varied viewing angles and distances to ensure robustness across imaging conditions – and a dedicated ROS 2 node was implemented to stream frames and perform real-time inference for hoop detection. Following...
Categories:
Robotics and systems